
今までOSDはRunCam Swift2に内臓されている電圧表示だけを頼りにしていました
それすら無くてもいいかなと思っているのですが不意に古いバッテリー差し込んで過放電してしまうよりかはいいですね
今回は新しく発売されたRunCam Splitを使いたいと思いまして。これにはOSD機能が無いので別途OSDを加える必要が出てきたので、その際に得た情報などを共有したいと思います
設定したのは2機。1つはMinimOSDを使い、他はFuriousFPVのPiggy OSDを使いました
どちらのOSDチップを使う場合にもRaceflight用のファームウェアでフラッシュする必要があります
FuriousFPVのPiggy OSDに関してはfor Raceflightなんて謳っていますが関係ないです。フラッシュが必要です
RaceflightのSlackグループの#osdtestersのチャンネルにピンされているrfosd_001.hexを使います
ファームウェアのフラッシュにはUSBtoシリアル変換ケーブルが必要

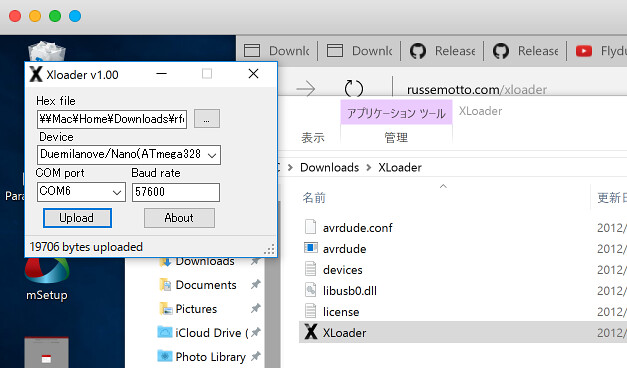
実際のアプリのフラッシュにはWindowsの場合はXloaderというアプリで行えます
MacにもHexUploaderというアプリがあります。XloaderもHexUploaderもArduino開発環境に含まれるavrdudeコマンドのラッパーなので、avrdudeで直接書き込みも可能だと思います。。。。汗
このファームウェアはこれで最終バージョンです。以後のOSD関連のアップデートはフライトコントローラー側で対応できるとの事
後はそれぞれの配線図にしたがって取り付けますが、Revolt FCでOSDに使えるUARTはTX1, TX3, TX4のいずれかになります。私はTX4を使いました
加えて、RFのTX4とNORのパッドをショートされる必要があります
その上でコンフィギュレーターでOSD用のポートを指定します。コマンドラインで下記を実行
[shell]
set telem_rfosd=4
save
[/shell]
4の部分は使うポートに合わせて変更してください
OSD機能はまだ実用段階では無く、あくまでもProof Of Concept(概念実証)です
参考までに、RunCam SplitからのHD映像にDVRのOSDの様子をのせた映像になります
ちなみにバッテリはー通常の4Sリポです。HVじゃないです。17vとか出ててぁゃιぃ笑
備忘録。電流の部分、消せるかどうかはわからないですが、とりあえず下記のコマンドで0にできるみたいです
[shell]
set adc_current_factor=0
save
[/shell]
キャリブレートする場合は下記のような形でできるとの事
このあたり、自分はまだ詳しくないので調査が必要
[shell]
set adc_current_factor=34.200
save
[/shell]
この日は時間が無く、夕暮れ前に数本飛ばせる程度だったので、今度RunCam Splitの映像について検証してみたいと思います
今回のテスト飛行でいくつか気になったところ
・HD映像の方にモーターとペラがかなり写り込んでいる。これについてはマウントを少し前にずらしてみた。ただしあまり出しすぎると今度はペラにぶつかってしまうので限界がある。加えて、今回の映像はカメラ角度30度だけどもう少しスピードをあげたいので今度は40度を試してみたい
ちなみにマウント類はこちらで公開しています
FLOSS RunCam Split Mount 25 to 70 deg
・音声の風の音。これはマイクの周りにフォームをかぶせると良くなるらしい
・画質。画面端の歪みや全体的な写りについての改善。初期のSplitユーザはGoProレンズに交換などをしているみたいだけど、先ほどRunCamのサイトをみたらGoProクオリティのレンズに+$3で変更できるオプションが追加されていた汗
・SDカードのスロットが墜落などでゆるくなりがち?NO CARDとか出るときがたまにあった
・急に映像がすごい遅延することがあった。フライト中に起きることはなかった。電源の抜き差しで直る
FLOSSフレームでGoPro無しだとバッテリー含んだ重量が410gと普段使っているカメレオン+GoProの600gとはかなり差がある
感覚的にはU199に近い浮遊感
電圧の低下も少なく、フライトタイムも長くなるのでレースの練習だけに使うのは勿体無い気がしてきた
コメントを残す