何度かPIDを教えて欲しいと言われたので、参考になればと思い自分のPID設定を公開します
最近使っているFCはBETAFPVのv1.1です。PIDに関しては以前使っていたBeeCoreの時と変わっていないので、BeeCoreの人も流用できます。おそらくMPU6500系のだったらどれもこの設定でいい感じに飛ぶと思います
NewBeeDroneのBeeBrainとFuriousFPVのAcroWhoopに関してはTinyWhoop専用のFCなのでデフォルトのPID設定でうまく飛ぶ値が予め設定されています
PIDの内容とCLIのコマンドはこちら
[plain]
set p_pitch = 92
set i_pitch = 80
set d_pitch = 25
set p_roll = 85
set i_roll = 70
set d_roll = 24
set p_yaw = 200
set i_yaw = 45
set d_yaw = 20
[/plain]
アクロの用のレートプロフィール
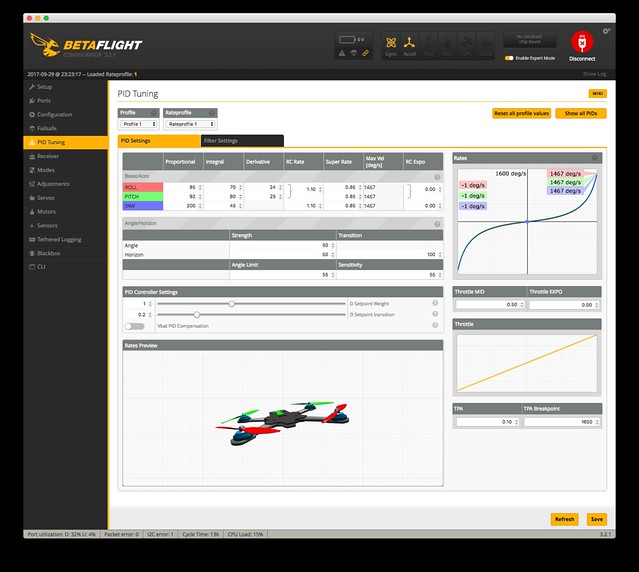
ロールとフリップの感覚を同じに保ちたいので5インチ機と同じようにしています
これで毎秒1460度回転するようになります
速いフリップやロールが出来ないって質問される事があるんですが、だいたいRatesが低すぎるか、プロポのスティックエンドを正しく設定していないかのどちらかです
室内レース等でレベルモードを使用する時は少しRatesを下げて、なおかつExpoも下げてより直線的な線になるようにしています
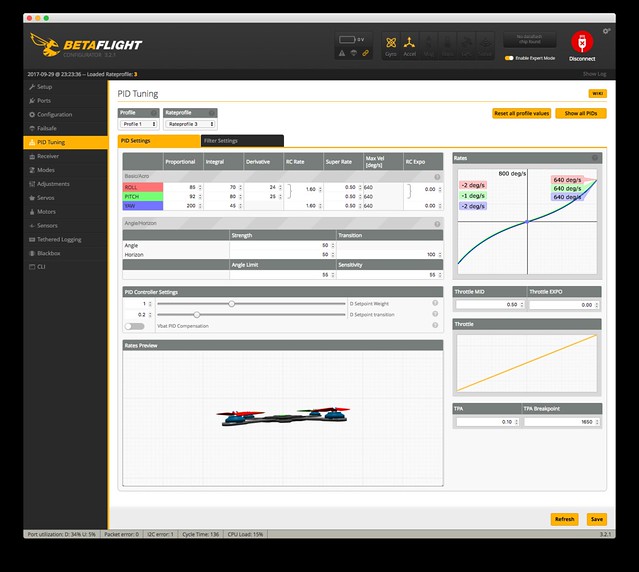
直線的な変化の方がスティック操作の動きに対して機体の動きが予測できるからです
アクロの時は、スティックがセンター付近で操作を鈍くしたいのでRC Rate低め、Super Rate高め。これはロールやフリッップの終わりをビタッと止めるのではなくヌルッと止めて映像をスムーズに見せてたいからです
またビタッと止めない事により、バウンスバックを抑える事も出来ます。バウンスバックはPが高すぎたり、Dが低すぎたりした時に、機体が急な動きから止まる際に細かく振動する現象です
RC RateはRatesを直線的に変化させる
Super Rateはスティックエンド付近を変化させる
RC Expoはスティック真ん中付近を緩やかにする
だと理解しています。これだとSuper RateとRC Rateの組み合わせだけで理想の曲線を作れるのでRC Expoの位置づけってよくわからないのですが、、、、パラメーターが多いと調整・管理が大変ですよね
少し話が脱線しましたが、Ratesの設定に戻り
Betaflightのちょっとした小技で、アクロモードとレベルモードを切り替えた時に自動的にRatesが変わるようにしています
私は予備2の3Wayスイッチでアクロ、レベルを切り替えています
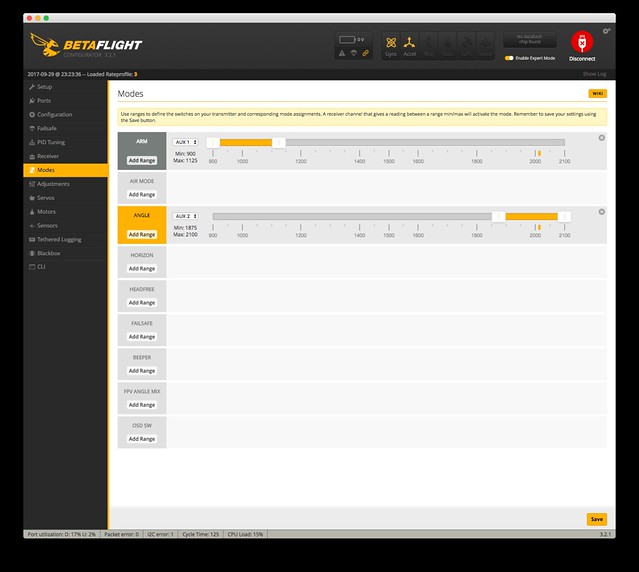
予備2の3WayでRateprofileが切り替わるように設定
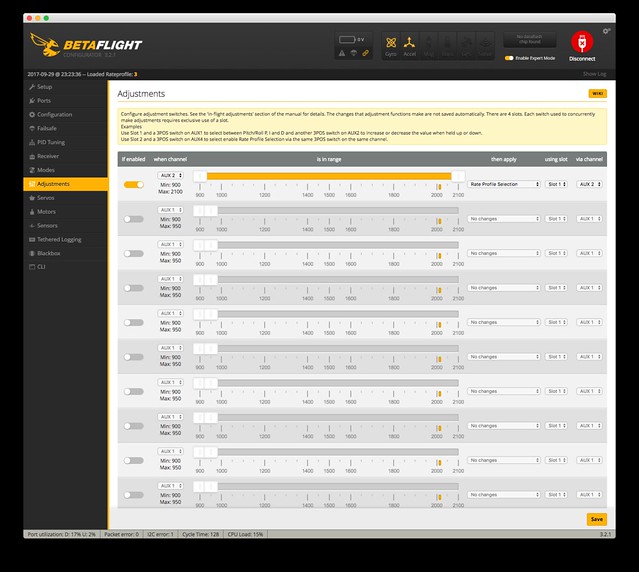
CLIだとこんな感じです
[plain]
adjrange 0 0 1 900 2100 12 1
rateprofile 0
rateprofile 0
set rc_rate = 110
set rc_rate_yaw = 110
set rc_expo = 0
set rc_yaw_expo = 0
set thr_mid = 50
set thr_expo = 0
set roll_srate = 85
set pitch_srate = 85
set yaw_srate = 85
set tpa_rate = 10
set tpa_breakpoint = 1650
rateprofile 1
rateprofile 1
set rc_rate = 160
set rc_rate_yaw = 160
set rc_expo = 0
set rc_yaw_expo = 0
set thr_mid = 50
set thr_expo = 0
set roll_srate = 50
set pitch_srate = 50
set yaw_srate = 50
set tpa_rate = 10
set tpa_breakpoint = 1650
rateprofile 2
rateprofile 2
set rc_rate = 160
set rc_rate_yaw = 160
set rc_expo = 0
set rc_yaw_expo = 0
set thr_mid = 50
set thr_expo = 0
set roll_srate = 50
set pitch_srate = 50
set yaw_srate = 50
set tpa_rate = 10
set tpa_breakpoint = 1650
[/plain]
最後に、dump configする際の注意点ですが、dump configすると現在GUIで選択中のRateprofileしかdumpされません。。。これ自分の環境なのかバグなのか分かりませんが、その際にはRateprofileを切り替えるなり、プロポと接続してスイッチで変えるなりして、それぞれのRateprofileをdumpして結合する必要があります
もしくはコマンド行をコピペして値だけ修正して保存しておく等も可能ですね
超やっつけですが、TinyWhoopのPID/Ratesの設定はこんな感じです!
何か分からない事や知りたいことありましたらコメントやtwitterなどで聞いてください
オープンソース主義なのでこれは秘密とか無いのでw
コメントを残す