月: 2017年9月
-
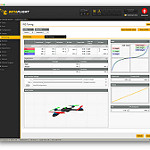
TinyWhoop PIDs / Rates
何度かPIDを教えて欲しいと言われたので、参考になればと思い自分のPID設定を公開します 最近使っているFCは…
-

JDL ROUND6
JAPAN DRONE LEAGUEのレースに参加してきました 初の5インチ機のレース。クラス分けはオープン、…
-

Fixed Wing Day 1
固定翼機始めました? 購入したのはReady Made RCのRecruit ドローンレーサーを飛ばしている人…
何度かPIDを教えて欲しいと言われたので、参考になればと思い自分のPID設定を公開します 最近使っているFCは…
JAPAN DRONE LEAGUEのレースに参加してきました 初の5インチ機のレース。クラス分けはオープン、…
固定翼機始めました? 購入したのはReady Made RCのRecruit ドローンレーサーを飛ばしている人…